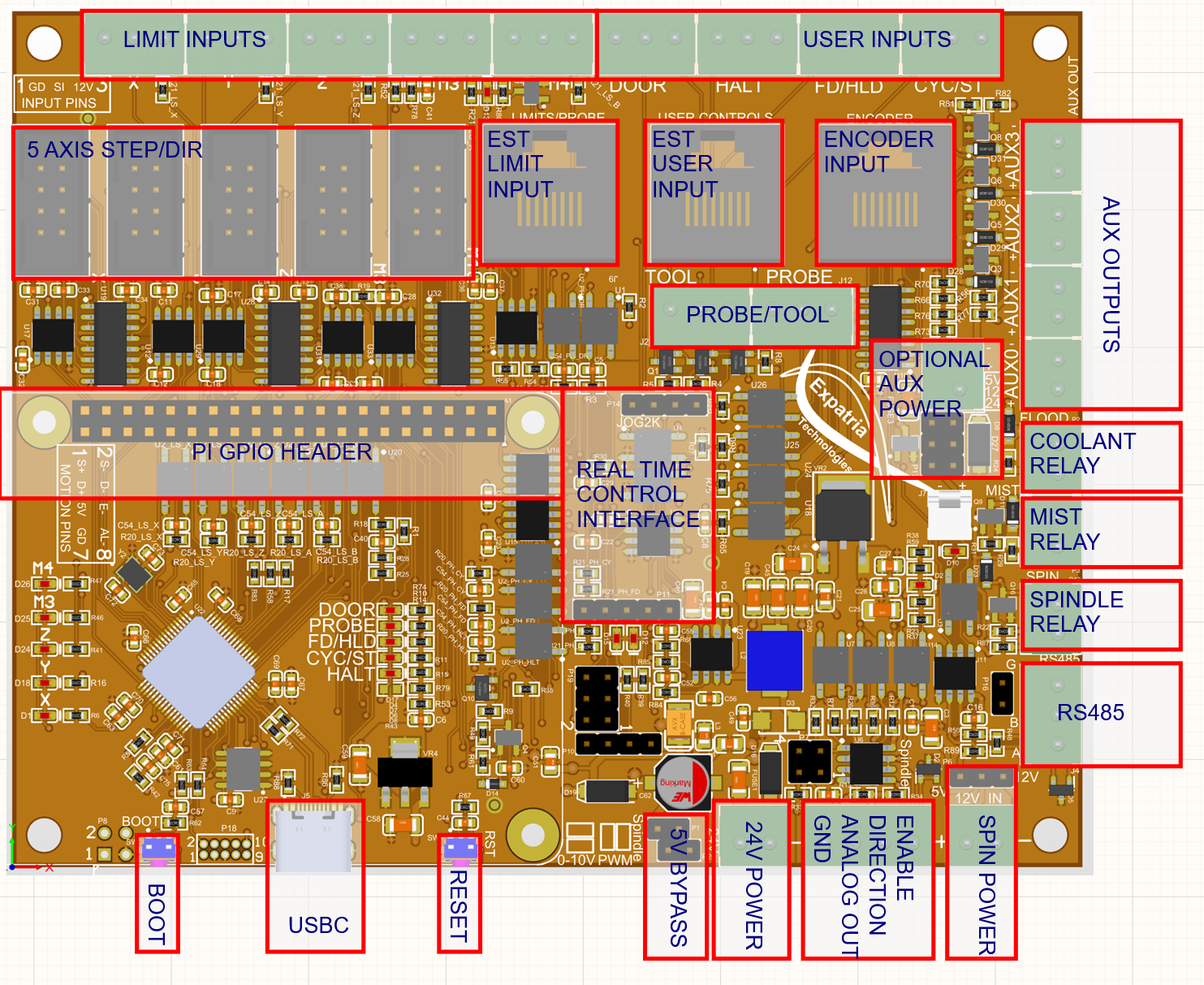
The Flexi-HAL board (Github link) is designed by PrintNC community member Drewnabobber as a successor to the GRBLHAL2000 board. It's a chip-down design (doesn't require an additional microcontroller soldered on) which supports control of up to 5 motors. In the case of the PrintNC with its ganged Y-axis this allows the addition of a 4th rotary axis.
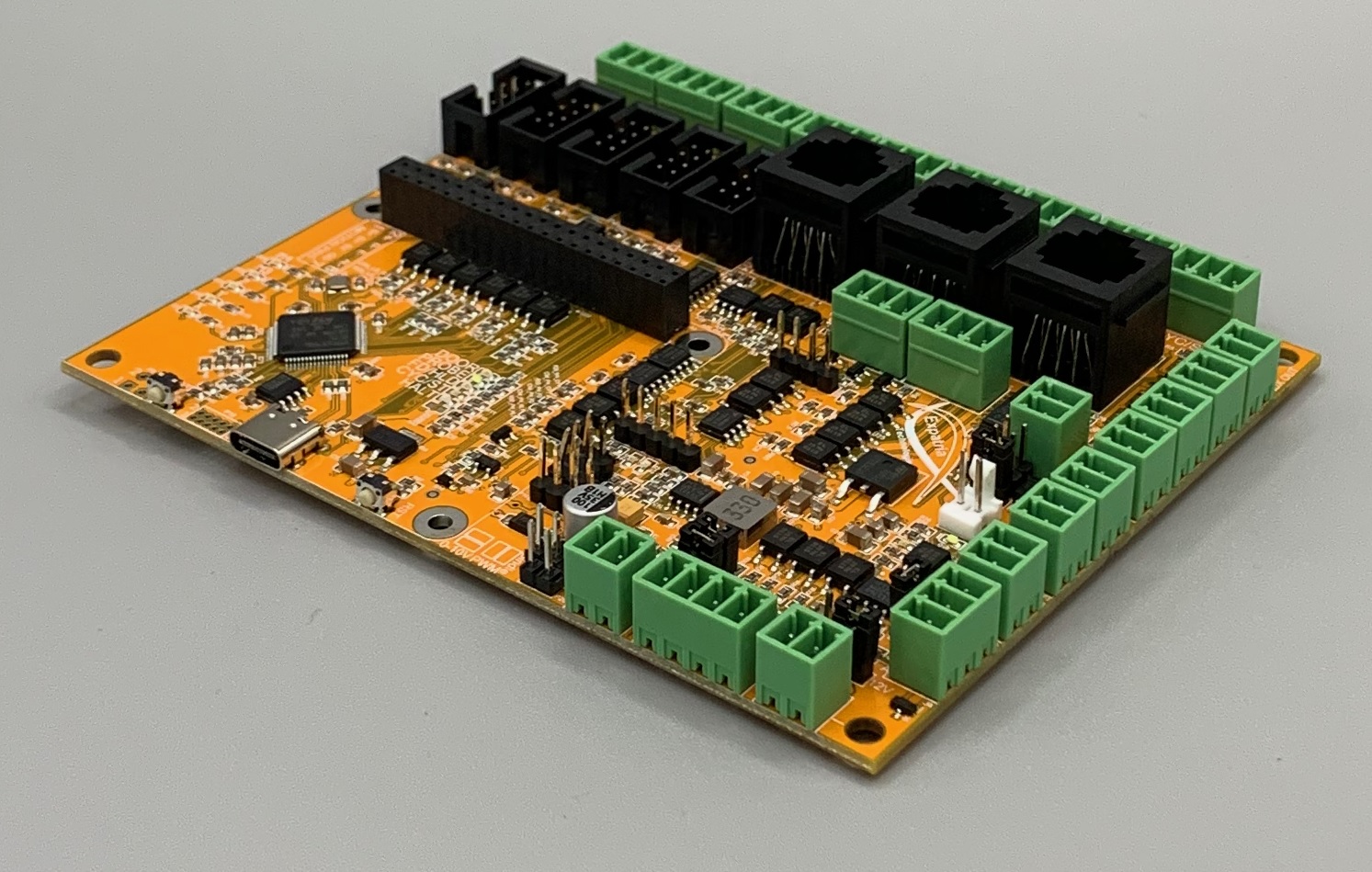
¶ Overview and pictures
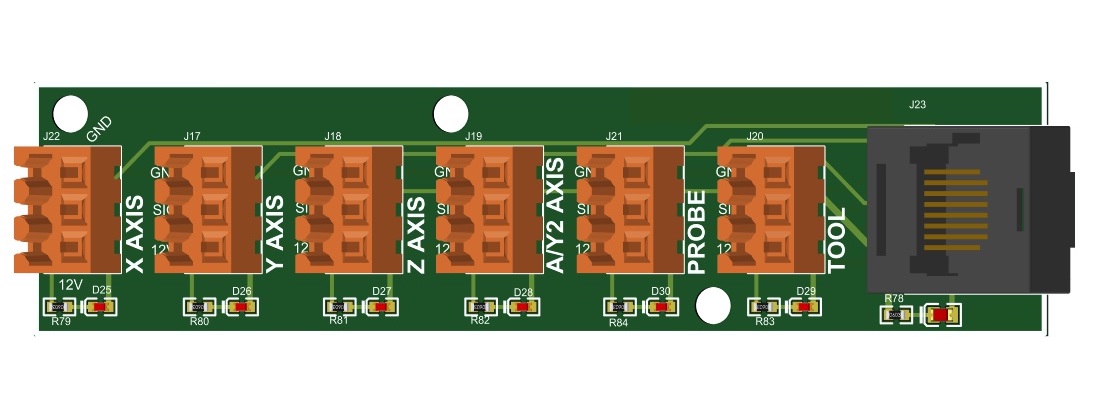
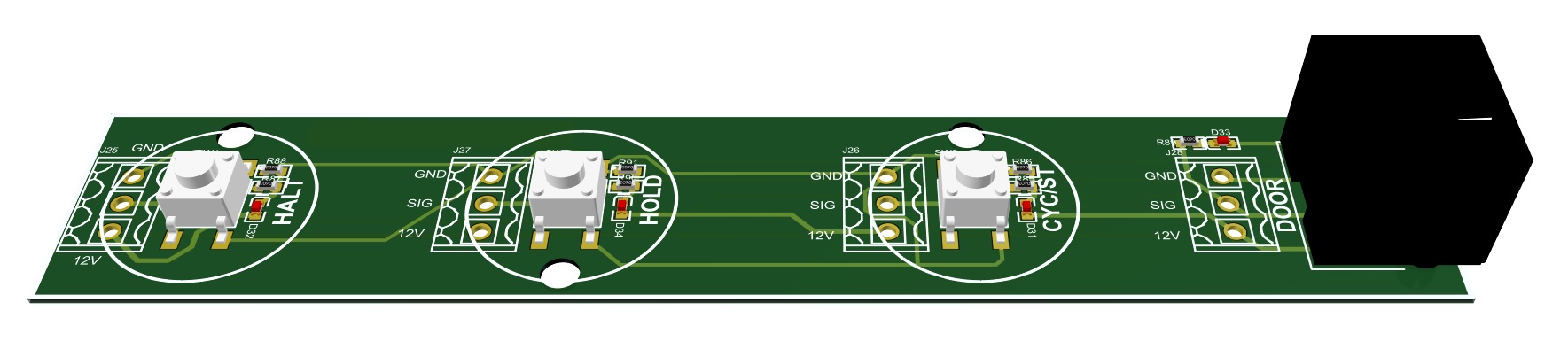
Flexi-HAL input/output is similar to the GRBLHAL2000 EST (Electronics Standardization Team) revision, which includes breakout boards for Limit/Probe sensors, and User Buttons. These connect to the board via RJ45 (ethernet) cable, and make wiring up your machine much simpler.
For more images, schematics and detailed information check out the official github.
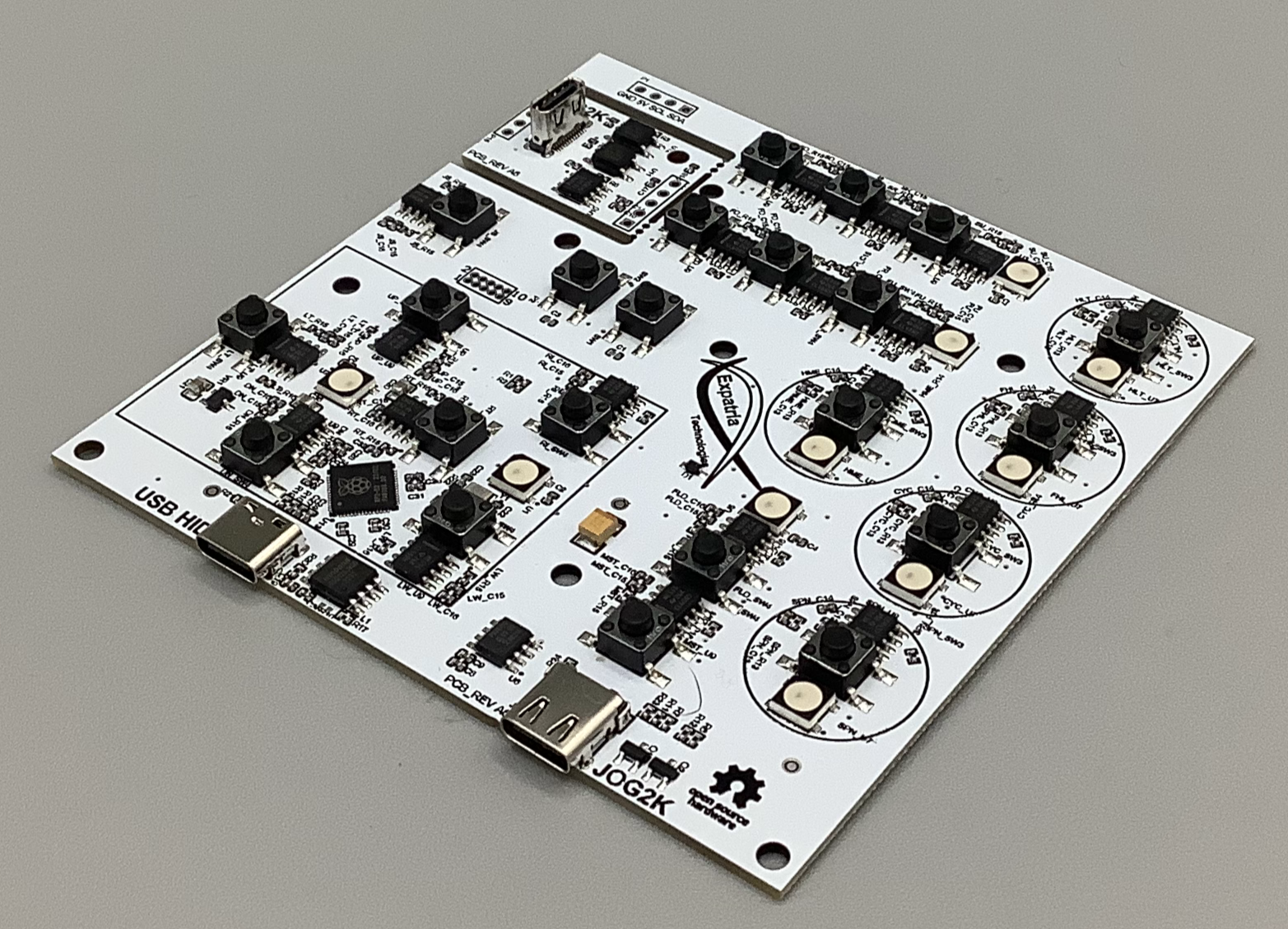
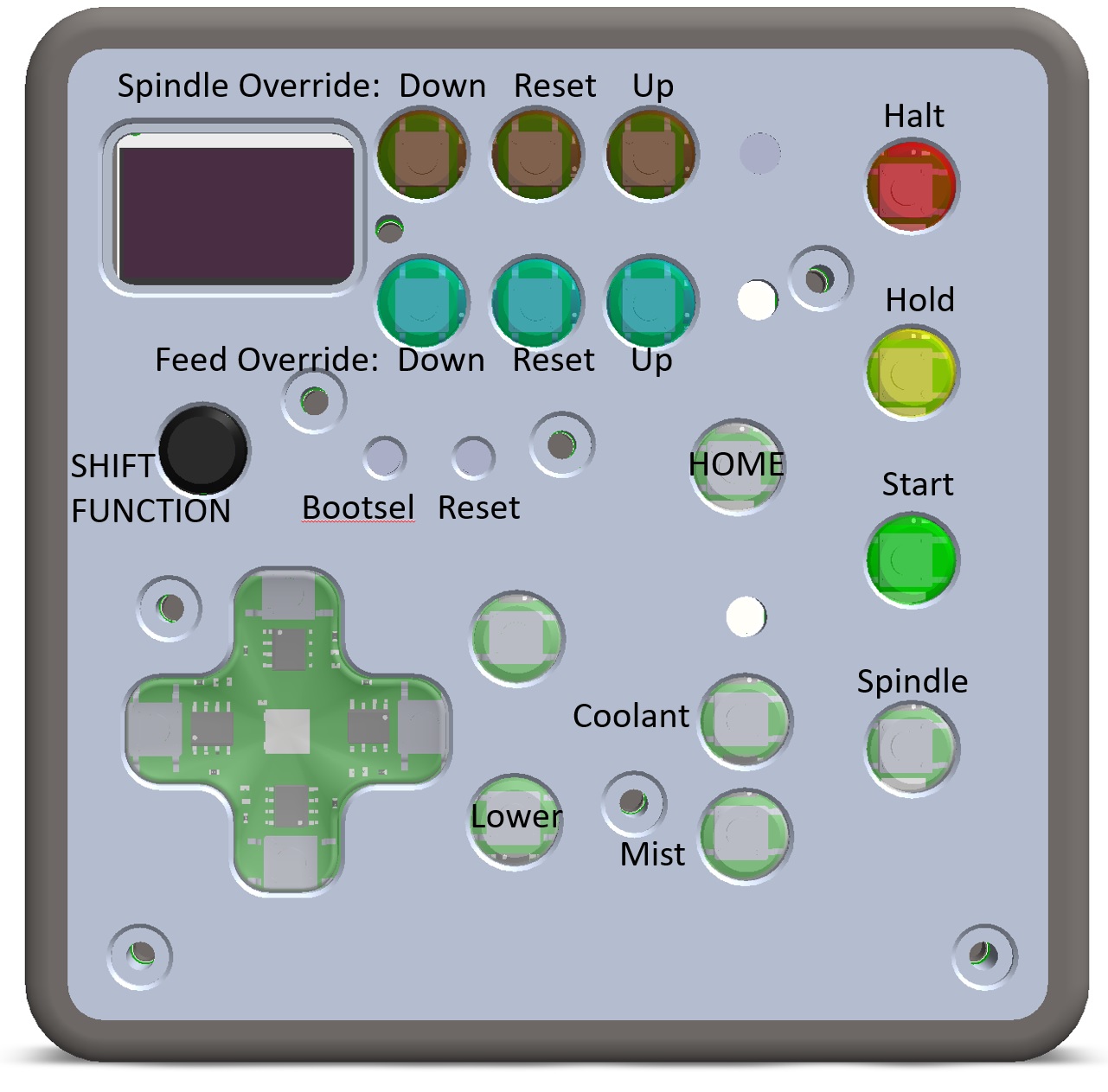
¶ Jog2K I2C Keypad Pendant
Flexi-HAL and GRBLHAL2000 boards also support the Jog2K keypad jogger pendant [github link], which connects to the controller via USB-C and communicates over I2C. It's powered by an inexpensive Raspberry Pi Pico, features RGB LED feedback for most buttons, and a 128x64 pixel OLED screen showing DRO, work coordinate system, feed rates, machine status etc.
The Jog2K's Shift button allows access to macro functions, jogging speed and rotary axis jogging if required.
For more information, check out the Jog2K wiki page. If you would like to order a batch yourself, there are instructions on the GRBLHAL2000 PCB ordering page.

¶ Where do I get one?
You can either check if anyone near to you has assembled a board you can buy directly from them or you can follow the guide to ordering a batch, assemble yourself and sell the additional boards.
GRBLHAL2000 Marketplace | PrintNC Wiki
Ask on the discord in the #grblhal channel if there is no local option for you, maybe someone is planning to order a board and you can organize a group-buy.