¶ Options
There are 3 known options for setting up RS485 communication to your YL-620A VFD in LinuxCNC.
¶ MB2HAL Guide
MB2HAL has successfully been used by the PrintNC community to connect to the VFD over RS485. There has been quite a bit of discussion on the LinuxCNC channel of the discord, but no formal guide has been written yet. Please help our community out by contributing instructions for configuring MB2HAL for the YL-620a. Thanks!
¶ VFDMod Guide
VFDMod is a LinuxCNC add-on with the intent to make communicating with VFDs easier. There appears to be some use of VFDMod in the community, but this documentation is currently untested.
This repository contains files and instructions for configuring VFDMod for the YL-620a. These instructions are currently untested by the PrintNC community, please update this page with your results & tips!
¶ Classic Ladder Guide
These instructions are based off the instructions found in this repository. but there were a few mistakes so i have uploaded a new repository
https://github.com/handsomebeast20/yl620-a-rs485-modbus-classicladder/tree/main
with the edited information and some new info that should help you get this running in no time, i can confirm this works using linuxcnc 2.8.4 using the axis gui, im also using the breakout board that came with the aliexpress kit. and when setting up stepconf wizard make sure to disable any pins that are linked to spindle as this will cause loading errors from duplicated pins after setting up your hal and ini files from this tutorial (ask me how i know)
(Files can be downloaded by clicking the green “Code” button and downloading the zip).
Classic Ladder is a powerful programming language in LinuxCNC that includes Modbus communication built in. Using it solely for the purpose of communicating with your spindle may be overkill, however Classic Ladder is a standard LCNC component which should be supported in future releases.
¶ YL-620A Parameter Settings
| Parameter | Value | Description |
| P00.01 | 3 | Start/Stop Signal from RS485 |
| P03.00 | 4 | 19200 Baud |
| P03.01 | 1 | RS485 Slave Address |
| P03.02 | 2 | Data Format: 8Bit, 1 Stop bit, No Parity |
| P07.08 | 5 | Frequency Source from RS485 |
Do not forget to power off and power on the VFD after changing settings to apply the new settings!
recommended adapters:


¶ Steps
- Setup the parameters on the VFD as described.
- Connect the VFD to your USB RS485 adapter.
- After downloading & extracting the files in the repository, copy vfd.hal, vfd.clp, and vfd.xml to your machine's configuration folder. (linuxcnc/config/<MACHINE NAME>)
- Add the following lines to your HAL file.
- Note: This can either be in your custom.hal file or the bottom of your <MACHINE NAME>.hal file.
loadrt classicladder_rt numS32out=100
addf classicladder.0.refresh servo-thread
loadusr classicladder --modmaster vfd.clp
net spindle-on classicladder.0.in-00 spindle.0.on
net spindle-brake classicladder.0.in-01 spindle.0.brake
net spindle-forward classicladder.0.in-02 spindle.0.forward
net spindle-reverse classicladder.0.in-03 spindle.0.reverse
net spindle-cmd-rpm <= spindle.0.speed-out
net spindle-cmd-rpm-abs <= spindle.0.speed-out-abs
net spindle-cmd-rps <= spindle.0.speed-out-rps
net spindle-cmd-rps-abs <= spindle.0.speed-out-rps-abs classicladder.0.floatin-00
- next open your .ini file and add these lines under the relevant section
- in the [DISPLAY] section add “PYVCP = vfd.xml” at the bottom
- in the [HAL] section add “POSTGUI_HALFILE = vfd.hal” at the bottom
- you will also need to add your user to the dialout group so open a termial window and type "sudo adduser "YOUR USERNAME" dialout"
- to verify your user is now a member of the dialout group type "sudo groups "YOUR USERNAME" which will list the groups that your user is part of
- Launch your LinuxCNC machine instance. If all went well, a Classic Ladder window should start with your machine showing the ladder you added and modbus should be connected. You can verify the Classic Ladder settings by clicking on the “Config” button in the Classic Ladder window.
- if you dont have a stable modbus connection then the only reason left is because you need to tell classicladder which adapter to use, to see what your adapter name is the easy way is to navigate to your \dev\ folder by clicking on the file manager icon at the bottom of your linux deskto next to the terminal icon, then click the file system in the top left under devices and open the \dev\ folder and scroll down till you see this
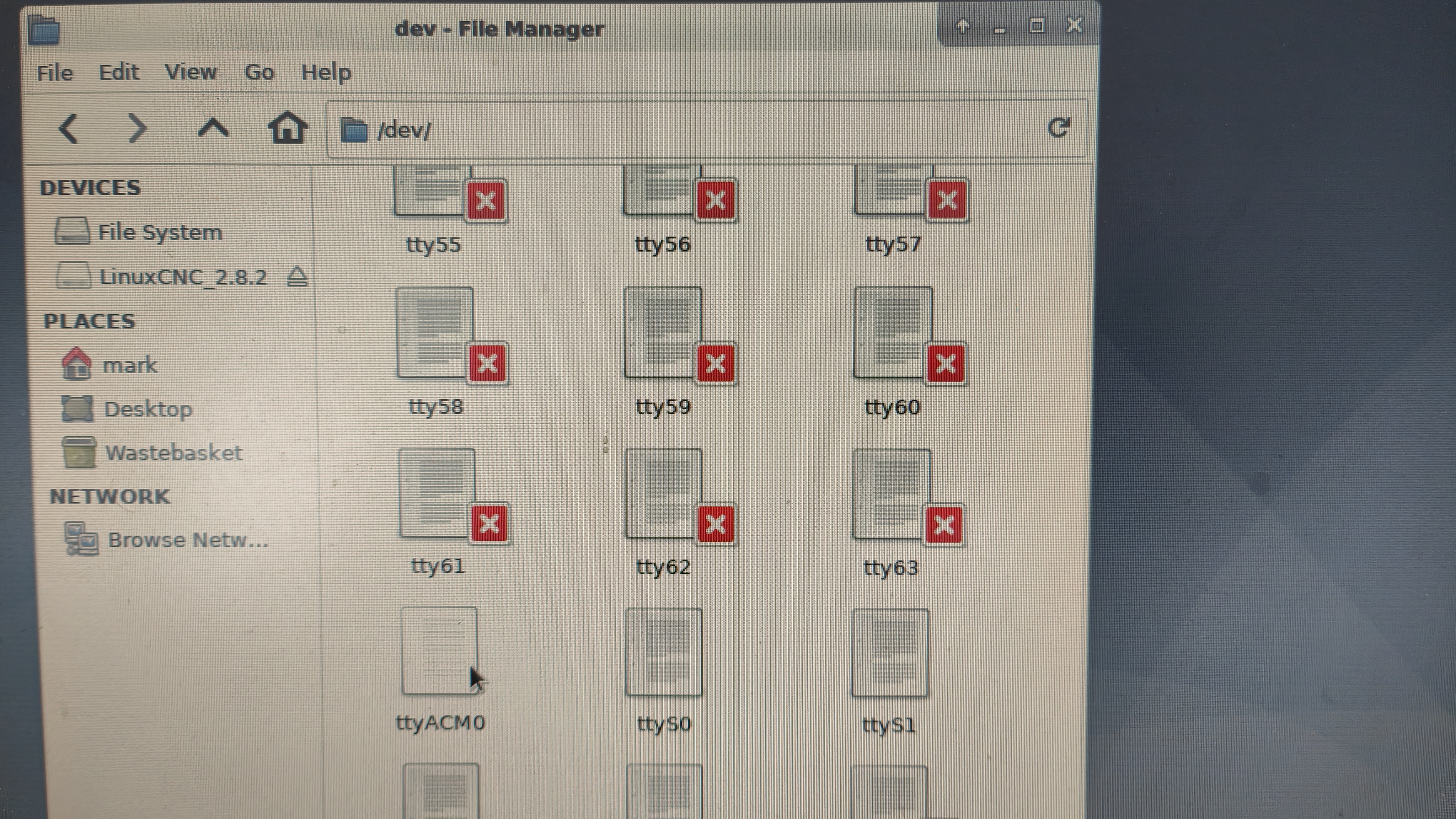
- now unpug your adapter and the ttyACM0 or ttUSB0 or ttyUSB1 should dissapear, plug it in again and it will re appear, this is how we know what linux has named our adater and can put these settings in the classicladder config tab, as you can see mine is ttyACM0 which classiclader config tab doesnt have an option for but there is a very simple solution for anybody who has ttyACMO as their adapter name and wants to save some headache heres the solution
- if you are using https://www.waveshare.com/usb-to-rs485.htm this usb adapter which i highly recommend as the failure rate of cheap adapters and problems arising while connecting using other adapters is very high, or any other adapter that shows up as /dev/ttyACMO as the classicladder configuration tab doesnt have this as a selectable option, so to remedy this open the vfd.clp file in a file editor window and towards the bottom you should see this text
MODBUS_MASTER_SERIAL_PORT=/dev/ttyUSB0
MODBUS_MASTER_SERIAL_SPEED=19200
MODBUS_MASTER_SERIAL_DATABITS=8
MODBUS_MASTER_SERIAL_STOPBITS=1
MODBUS_MASTER_SERIAL_PARITY=0
MODBUS_ELEMENT_OFFSET=0
MODBUS_MASTER_SERIAL_USE_RTS_TO_SEND=0
MODBUS_MASTER_TIME_INTER_FRAME=100
MODBUS_MASTER_TIME_OUT_RECEIPT=500
MODBUS_MASTER_TIME_AFTER_TRANSMIT=100
MODBUS_DEBUG_LEVEL=0
MODBUS_MAP_COIL_READ=0
MODBUS_MAP_COIL_WRITE=1
MODBUS_MAP_INPUT=0
MODBUS_MAP_HOLDING=0
MODBUS_MAP_REGISTER_READ=1
MODBUS_MAP_REGISTER_WRITE=0 _/FILE-com_params.txt
"MODBUS_MASTER_SERIAL_PORT=/dev/ttyUSB0"
(this is the line that needs editing with /dev/ttyACM0)
edit the text and save the file
now when you open linuxcnc and open up the config window in classicladder you will see it has changed to/dev/ttyACM0 and it will now work ,also i set the vfd to 19200 8 n 1 and kept the same in the the classicladder config tab to get mine working, but we also need to configure the adapter in linux for it to stay this way permanently for the adapter which at default is set to 9600 8n1 and can be changed via terminal but unplugging and restarting linux causes thes changes to be put back to default so the solution for this i have the following permanenty set and forget solution
- to permanently configure the adapter in linux without using a terminal i used GTKTERM which adds an app to your applications/accesories. to download this in the same terminal window you have open from the previous steps type “sudo apt-get install gtkterm”
- when installed go to applications and under accessories should now be a new application called "serial port terminal"
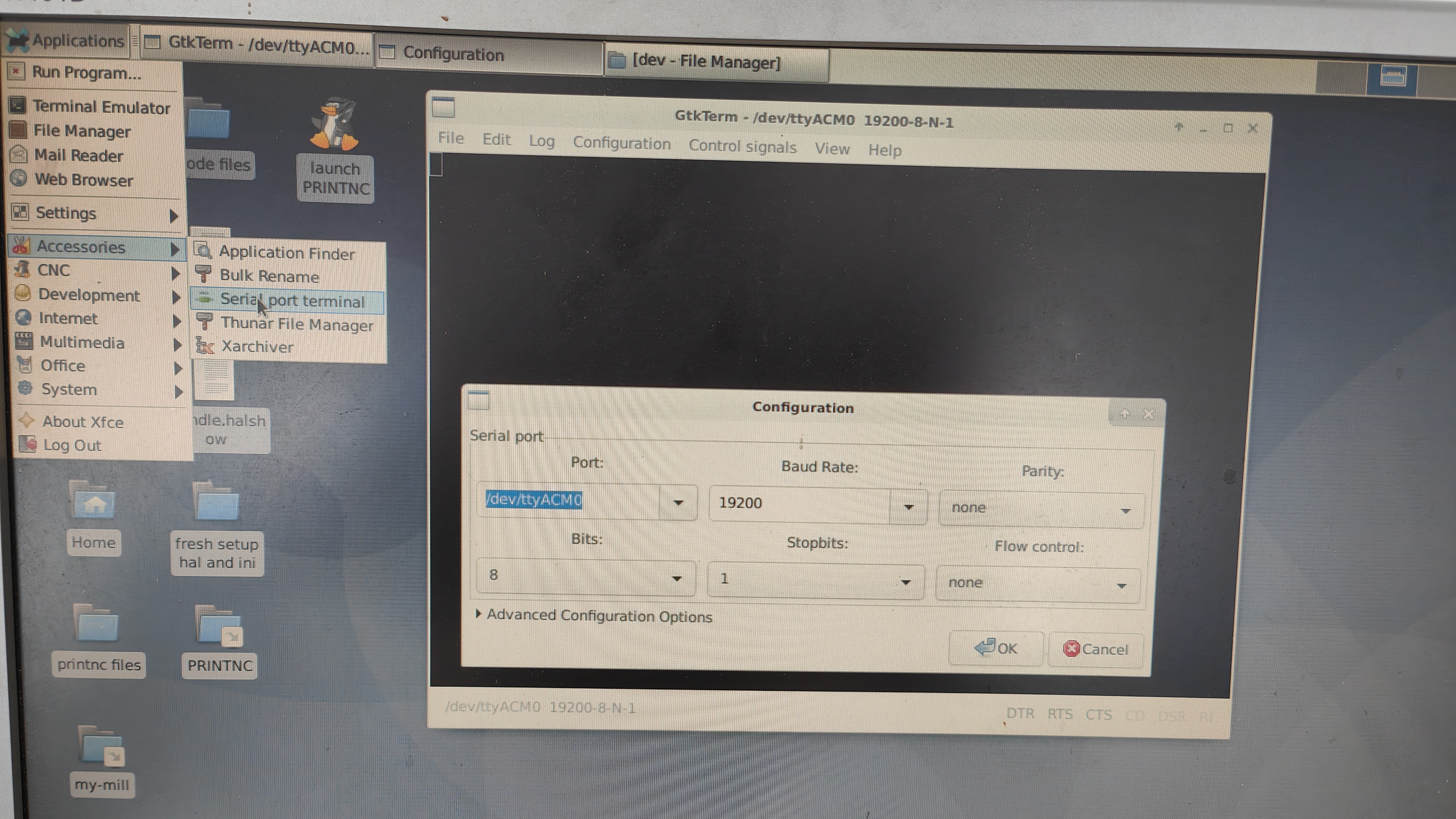
- open it up and on the configuration tab you can now change and save a permanent configuration for your adapter and any other adapter you are using. this way i had a solid connection as some people were complaining about the vfd being noisy and dropping connection. match these settings to your vfd settings i.e baud rate stop bits parity ect as without doing this the adapter default settings were 9600 8 n 1 and this is reset every time the adapter is connected or disconnected, this makes a permanent change to the adapter settings making it a set and forget option (when done click on the configuration tab and save the configuration as “DEFAULT” or “rs485 adapter” as it loads this into settings for the adapter whenever it is plugged in or in use, if you previously tried another adapter it will use that adapters setting so delete any configurations that may have been previously saved, it will usualy save the config as “DEFAULT” unless you rename it. so delete the default config or overwrite it with your new settings so it will use the new adapter,
- now open linuxcnc and you should if all steps have been followed and setup corectly, have a stable modbus connection.
- open your mdi in linuxcnc window and type m3 s12000, m3 starts the spindle in a clockwise rotation and the s***** number is the speed in rpms as long as your spindle overide bar is at 100 percent in the normal window, m4 is counter clockwise and m5 is a stop or m3 s0,
- for safety reasons stand clear if the spindle and make sure its safe to turn the spindle on, that the bit in it is secured correctly, then click the go button next to the mdi field you just put your command into and your spindle will start to run at 12000 rpm, i say 12000 rpm because this is the above the lowest speed the ali kit spindle should be run at , if you run at lower rpms than what is reccomended you risk damaging your spindle, and voiding the warranty if its new so 12000 is a safe bet which should also show 200hz on the display of your vfd, you can increse the speed with f12 and decrease it with f11, press esc and the spindle will stop if you are on the mdi tab if not then the stop button on the normal gui window will work and the brake tick box will be ticked, turn that off before starting the spindle again, you can also use the + and - buttons on the gui screen and the forward and reverse buttons which should now also work and the pyvcp panel with the dial should also show rs485 connected and spindle at speed(shows when the spindle is up to desired speed) and speed indicated by the dial with the needle when the spindle is running but as a warning, starting the spindle with the + button starts at a frequency of 10hz in increnments of 10hz and the lowest frequency that the spindle will actually start spinning is 120 hz or so if you want to start it that way “HAPPY CLICKING MY FRIEND” youll be there a while. and at the lower speed you risk damaging your spindle so just dont, you dont wanna break your new spindle now do you, and your gcode will now start your spindle whith the speeds you selected in your cam of choice and your all set give yourself a tap on the back, you can now control your spindle in linuxcnc
¶ Tips
DO NOT and i repeat DO NOT BY ANY MEANS use a usb extention cable. the adapter came with a cable that has a built in ferrite and is also shielded but if i used it, as soon as i send a command to linuxcnc the connection would drop straight away. so if your trying to get this method working DONT use an extention cable for the usb adapter. also buy the adapter i listed above as people were sayin they had to use resistors to negate noise from the vfd signal to the adapter but this has them on the adapter pcb and is also lighting proof according to the specs. i tried a cheap usb adapter previously but due to a noisy signal couldnt get that working, you may be lucky but the setup is problematic enough without adding caveats yourself.
This configuration was confirmed working on a setup with a parallel breakout board, but should work similarly for Mesa cards as well. When using the Stepconf wizard, all spindle pins were set to unused and the “Include Classic Ladder PLC” on the options screen was left unchecked.
also i have now switched to /en/https://www.waveshare.com/wiki/USB_TO_RS232/485/TTL using the adapter in this link as i am about to put all my electronics into an enclosure, and it works the same as the usb dongle type adapter but is in a metal housing which helps shield the pcb from noise and can be used with the supplied usb cable that it comes with to connect it to the pc, which i have tested and it works flawlessly, there is a switch for 3.3v and 5v on the side of the unit, for me the connection is only stable if using the 5v setting as 3.3v dropped connection after starting the spindle but the 5v setting it keeps connection, i have tested it using a 1m long jst-xh male to female cable to connect it to the vfd, untwisted as it has connectors on both ends and connected that to a 10cm male jst-xh that is connected to the green terminal block on the adapter and this works fine, others who have had problems have bought this adapter and put it in their enclosure next to the vfd with a short twisted pair wire and had no issues, where as they had issues with other adapters connecting and staying connected without errors,